
Overview¶
The 8-puzzle is a classic AI problem consisting of a 3×3 grid with tiles numbered 1–8 and one blank space.
The goal is to slide tiles until the board matches the goal configuration.
Initial State Goal State
┌───┬───┬───┐ ┌───┬───┬───┐
│ 1 │ 2 │ 5 │ │ 1 │ 2 │ 3 │
├───┼───┼───┤ → ├───┼───┼───┤
│ 3 │ 4 │ │ │ 4 │ 5 │ 6 │
├───┼───┼───┤ ├───┼───┼───┤
│ 6 │ 7 │ 8 │ │ 7 │ 8 │ │
└───┴───┴───┘ └───┴───┴───┘Algorithms Covered¶
| Algorithm | Strategy | Complete | Optimal | Space |
|---|---|---|---|---|
| BFS | Level-by-level (FIFO) | ✅ Yes | ✅ Yes | Exponential |
| DFS | Depth-first (LIFO) | ⚠️ With limit | ❌ No | Linear |
| UCS | Lowest cost first | ✅ Yes | ✅ Yes | Exponential |
# Install required packages (run once)
import subprocess, sys
subprocess.run([sys.executable, "-m", "pip", "install", "ipywidgets", "matplotlib", "--quiet"], check=False)
print("Dependencies ready.")
Dependencies ready.
import heapq
import time
import sys
from collections import deque
import matplotlib.pyplot as plt
import matplotlib.patches as mpatches
import matplotlib.colors as mcolors
import ipywidgets as widgets
from IPython.display import display, clear_output
import warnings
warnings.filterwarnings("ignore")
print("All imports successful ✓")
All imports successful ✓
Part 1 — State Representation & Puzzle Core¶
A state is represented as a tuple of 9 integers, read row-by-row (left-to-right, top-to-bottom).0 represents the blank tile.
State tuple: (1, 2, 5, 3, 4, 0, 6, 7, 8)
Board layout:
1 2 5
3 4 _
6 7 8Moves are defined by how the blank (index of 0) can swap with adjacent tiles:
| Move | Blank shifts by | Valid when |
|---|---|---|
| Up | −3 | row > 0 |
| Down | +3 | row < 2 |
| Left | −1 | col > 0 |
| Right | +1 | col < 2 |
# ─── Puzzle Core ──────────────────────────────────────────────────────────────
GOAL_STATE = (1, 2, 3, 4, 5, 6, 7, 8, 0)
MOVES = {
"Up": -3,
"Down": +3,
"Left": -1,
"Right": +1,
}
def is_goal(state):
"""Return True if state matches the goal."""
return state == GOAL_STATE
def get_blank(state):
"""Return the (row, col) position of the blank tile."""
idx = state.index(0)
return idx // 3, idx % 3
def get_neighbors(state):
"""
Generate all valid successor states together with the move name and step cost.
Returns a list of (move_name, new_state, cost) tuples.
"""
row, col = get_blank(state)
blank = row * 3 + col
neighbors = []
moves_valid = []
if row > 0: moves_valid.append(("Up", MOVES["Up"]))
if row < 2: moves_valid.append(("Down", MOVES["Down"]))
if col > 0: moves_valid.append(("Left", MOVES["Left"]))
if col < 2: moves_valid.append(("Right", MOVES["Right"]))
for move_name, delta in moves_valid:
lst = list(state)
lst[blank], lst[blank + delta] = lst[blank + delta], lst[blank]
neighbors.append((move_name, tuple(lst), 1)) # uniform cost = 1
return neighbors
def print_state(state, label=""):
"""Pretty-print a puzzle state."""
if label:
print(f" {label}")
for i in range(0, 9, 3):
row = ""
for v in state[i:i+3]:
row += f" {v if v != 0 else '_'}"
print(row)
print()
def reconstruct_path(came_from, start, goal):
"""Reconstruct the sequence of (move, state) from start to goal."""
path = []
state = goal
while state != start:
move, prev = came_from[state]
path.append((move, state))
state = prev
path.reverse()
return path
# ── Quick sanity check ────────────────────────────────────────────────────────
sample = (1, 2, 5, 3, 4, 0, 6, 7, 8)
print_state(sample, label="Sample initial state")
print("Blank at:", get_blank(sample))
print("Neighbors:")
for mv, ns, c in get_neighbors(sample):
print(f" Move {mv:5s} → {ns}")
Sample initial state
1 2 5
3 4 _
6 7 8
Blank at: (1, 2)
Neighbors:
Move Up → (1, 2, 0, 3, 4, 5, 6, 7, 8)
Move Down → (1, 2, 5, 3, 4, 8, 6, 7, 0)
Move Left → (1, 2, 5, 3, 0, 4, 6, 7, 8)
# ─── Visualization Helper ─────────────────────────────────────────────────────
def draw_state(ax, state, title="", highlight=None):
"""Draw a single puzzle state as a grid on a matplotlib Axes."""
ax.set_xlim(0, 3)
ax.set_ylim(0, 3)
ax.set_aspect("equal")
ax.axis("off")
if title:
ax.set_title(title, fontsize=9, pad=4, fontweight="bold")
for idx, val in enumerate(state):
r, c = idx // 3, idx % 3
y = 2 - r # flip so row 0 is at top
if val == 0:
color = "#e0e0e0"
txt = ""
elif highlight and idx in highlight:
color = "#ffd54f"
txt = str(val)
else:
color = "#4fc3f7"
txt = str(val)
rect = plt.Rectangle([c, y], 1, 1, linewidth=1.5,
edgecolor="#333", facecolor=color)
ax.add_patch(rect)
if txt:
ax.text(c + 0.5, y + 0.5, txt,
ha="center", va="center",
fontsize=18, fontweight="bold", color="#1a237e")
def draw_path(path, start, title="Solution Path", max_show=12):
"""Visualise the solution path as a row of puzzle states."""
states = [start] + [s for _, s in path]
moves = ["Start"] + [m for m, _ in path]
if len(states) > max_show:
states = states[:max_show]
moves = moves[:max_show]
truncated = True
else:
truncated = False
n = len(states)
fig, axes = plt.subplots(1, n, figsize=(n * 2.0, 2.8))
if n == 1:
axes = [axes]
fig.suptitle(title, fontsize=11, fontweight="bold", y=1.02)
for i, (ax, state, move) in enumerate(zip(axes, states, moves)):
draw_state(ax, state, title=f"[{i}] {move}")
if i > 0:
ax.annotate("", xy=(-0.15, 0.5), xycoords="axes fraction",
xytext=(0.0, 0.5),
arrowprops=dict(arrowstyle="<-", color="gray", lw=1.5))
if truncated:
fig.text(0.99, -0.05,
f"(showing first {max_show} of {len(path)+1} steps)",
ha="right", fontsize=8, color="gray")
plt.tight_layout()
plt.show()
# ── Demo using sample state ───────────────────────────────────────────────────
fig, ax = plt.subplots(figsize=(2.4, 2.4))
draw_state(ax, GOAL_STATE, title="Goal State")
plt.tight_layout()
plt.show()
Part 2 — Breadth-First Search (BFS)¶
How it works¶
BFS explores states level by level using a FIFO queue.
All states at depth are examined before any state at depth .
Queue: [start]
while queue not empty:
node = queue.popleft() # dequeue from front
if goal(node): return path
for each neighbor of node:
if not visited:
visited.add(neighbor)
queue.append(neighbor)Properties:
Complete — guaranteed to find a solution if one exists
Optimal — finds the shallowest (shortest) solution
Time/Space — where = branching factor, = solution depth
# ─── BFS Implementation ───────────────────────────────────────────────────────
def bfs(start):
"""
Breadth-First Search for the 8-puzzle.
Parameters
----------
start : tuple – initial puzzle state (9-element tuple, 0 = blank)
Returns
-------
dict with keys:
path – list of (move, state) from start to goal
nodes_expanded – number of states dequeued & expanded
max_frontier – peak frontier (queue) size
time_s – wall-clock seconds
found – bool, whether a solution was found
"""
if is_goal(start):
return dict(path=[], nodes_expanded=0, max_frontier=1, time_s=0.0, found=True)
frontier = deque([start]) # FIFO queue
visited = {start} # closed set
came_from = {start: None} # state → (move, parent_state)
nodes_expanded = 0
max_frontier = 1
t0 = time.perf_counter()
while frontier:
max_frontier = max(max_frontier, len(frontier))
state = frontier.popleft() # ← FIFO
nodes_expanded += 1
for move, neighbor, _ in get_neighbors(state):
if neighbor not in visited:
visited.add(neighbor)
came_from[neighbor] = (move, state)
if is_goal(neighbor):
t1 = time.perf_counter()
path = reconstruct_path(came_from, start, neighbor)
return dict(path=path, nodes_expanded=nodes_expanded,
max_frontier=max_frontier,
time_s=round(t1 - t0, 4), found=True)
frontier.append(neighbor)
t1 = time.perf_counter()
return dict(path=[], nodes_expanded=nodes_expanded,
max_frontier=max_frontier,
time_s=round(t1 - t0, 4), found=False)
# ── Run BFS on sample puzzle ──────────────────────────────────────────────────
# (1,2,5,3,4,0,6,7,8) has 2 inversions → solvable
START = (1, 2, 5, 3, 4, 0, 6, 7, 8)
print("=== BFS ===")
print_state(START, label="Initial State")
result_bfs = bfs(START)
if result_bfs["found"]:
print(f" Solution depth : {len(result_bfs['path'])} moves")
print(f" Nodes expanded : {result_bfs['nodes_expanded']:,}")
print(f" Max frontier size : {result_bfs['max_frontier']:,}")
print(f" Time : {result_bfs['time_s']} s\n")
print(" Move sequence:", " → ".join(m for m, _ in result_bfs["path"]))
else:
print(" No solution found.")
=== BFS ===
Initial State
1 2 5
3 4 _
6 7 8
Solution depth : 21 moves
Nodes expanded : 49,595
Max frontier size : 18,252
Time : 0.2126 s
Move sequence: Down → Left → Up → Left → Down → Right → Right → Up → Left → Left → Up → Right → Right → Down → Left → Up → Left → Down → Down → Right → Right
# ─── Visualise BFS path ───────────────────────────────────────────────────────
if result_bfs["found"]:
draw_path(result_bfs["path"], START, title=f"BFS Solution — {len(result_bfs['path'])} moves")

Part 3 — Depth-First Search (DFS)¶
How it works¶
DFS explores states by diving as deep as possible before backtracking.
It uses a LIFO stack and a depth limit to avoid infinite loops.
Stack: [start]
while stack not empty:
node, depth = stack.pop() # pop from top
if goal(node): return path
if depth >= limit: continue # depth cut-off
for each neighbor of node (reversed):
if not visited:
stack.append((neighbor, depth+1))Properties:
Complete — only with a depth limit and visited set
Optimal — ❌ may find a longer path first
Time — where = max depth
Space — — much more memory-efficient than BFS
# ─── DFS Implementation ───────────────────────────────────────────────────────
def dfs(start, depth_limit=150):
"""
Depth-First Search (with depth limit & visited set) for the 8-puzzle.
Parameters
----------
start : tuple – initial state
depth_limit : int – maximum search depth (prevents infinite loops)
Returns
-------
Same dict structure as bfs().
"""
if is_goal(start):
return dict(path=[], nodes_expanded=0, max_frontier=1, time_s=0.0, found=True)
# Stack entries: (state, depth, came_from snapshot for this branch)
# We store came_from globally and overwrite — DFS is not optimal anyway.
stack = [(start, 0)] # LIFO stack
visited = {start}
came_from = {start: None}
nodes_expanded = 0
max_frontier = 1
t0 = time.perf_counter()
while stack:
max_frontier = max(max_frontier, len(stack))
state, depth = stack.pop() # ← LIFO
nodes_expanded += 1
if is_goal(state):
t1 = time.perf_counter()
path = reconstruct_path(came_from, start, state)
return dict(path=path, nodes_expanded=nodes_expanded,
max_frontier=max_frontier,
time_s=round(t1 - t0, 4), found=True)
if depth >= depth_limit:
continue # depth cut-off
# Reverse so that "Up" is tried first when popped
for move, neighbor, _ in reversed(get_neighbors(state)):
if neighbor not in visited:
visited.add(neighbor)
came_from[neighbor] = (move, state)
stack.append((neighbor, depth + 1))
t1 = time.perf_counter()
return dict(path=[], nodes_expanded=nodes_expanded,
max_frontier=max_frontier,
time_s=round(t1 - t0, 4), found=False)
# ── Run DFS on sample puzzle ──────────────────────────────────────────────────
print_state(START, label="Initial State")
result_dfs = dfs(START, depth_limit=20000)
if result_dfs["found"]:
print(f" Solution depth : {len(result_dfs['path'])} moves")
print(f" Nodes expanded : {result_dfs['nodes_expanded']:,}")
print(f" Max frontier size : {result_dfs['max_frontier']:,}")
print(f" Time : {result_dfs['time_s']} s\n")
print(" Move sequence:", " → ".join(m for m, _ in result_dfs["path"]))
else:
print(" No solution found (depth limit reached or unsolvable).")
# ─── Visualise DFS path ───────────────────────────────────────────────────────
if result_dfs["found"]:
draw_path(result_dfs["path"], START,
title=f"DFS Solution — {len(result_dfs['path'])} moves (depth limit 50)")
else:
print("DFS did not find a solution within the depth limit.")

Part 4 — Uniform Cost Search (UCS)¶
How it works¶
UCS always expands the node with the lowest cumulative path cost .
It uses a min-heap priority queue ordered by .
PQ: [(cost=0, start)]
while PQ not empty:
cost, node = heappop(PQ) # cheapest node
if goal(node): return path
for each (neighbor, step_cost):
new_cost = cost + step_cost
if neighbor not seen or cheaper:
heappush(PQ, (new_cost, neighbor))Since every step has cost = 1 in the standard 8-puzzle, UCS behaves identically to BFS.
The implementation below uses general step costs so you can experiment with non-uniform costs.
Properties:
Complete — yes (positive step costs)
Optimal — yes, finds minimum-cost solution
Time/Space — where = optimal cost
# ─── UCS Implementation ───────────────────────────────────────────────────────
def ucs(start, cost_fn=None):
"""
Uniform Cost Search for the 8-puzzle.
Parameters
----------
start : tuple – initial state
cost_fn : callable(move, state) → int, optional
Custom step-cost function. Defaults to 1 for every move.
Returns
-------
Same dict structure as bfs().
"""
if cost_fn is None:
cost_fn = lambda move, state: 1 # default: uniform cost
if is_goal(start):
return dict(path=[], nodes_expanded=0, max_frontier=1, time_s=0.0, found=True)
# Priority queue entries: (cumulative_cost, tie_breaker, state)
counter = 0
frontier = [(0, counter, start)]
heapq.heapify(frontier)
visited = {} # state → best cost seen
came_from = {start: None}
nodes_expanded = 0
max_frontier = 1
t0 = time.perf_counter()
while frontier:
max_frontier = max(max_frontier, len(frontier))
g, _, state = heapq.heappop(frontier)
# Skip if we already found a cheaper path to this state
if state in visited and visited[state] < g:
continue
visited[state] = g
nodes_expanded += 1
if is_goal(state):
t1 = time.perf_counter()
path = reconstruct_path(came_from, start, state)
return dict(path=path, nodes_expanded=nodes_expanded,
max_frontier=max_frontier,
time_s=round(t1 - t0, 4), found=True,
total_cost=g)
for move, neighbor, _ in get_neighbors(state):
step = cost_fn(move, state)
new_g = g + step
if neighbor not in visited or visited[neighbor] > new_g:
came_from[neighbor] = (move, state)
counter += 1
heapq.heappush(frontier, (new_g, counter, neighbor))
t1 = time.perf_counter()
return dict(path=[], nodes_expanded=nodes_expanded,
max_frontier=max_frontier,
time_s=round(t1 - t0, 4), found=False, total_cost=None)
# ── Run UCS on sample puzzle (uniform cost = 1) ───────────────────────────────
print("=== UCS (uniform step cost = 1) ===")
print_state(START, label="Initial State")
result_ucs = ucs(START)
if result_ucs["found"]:
print(f" Solution depth : {len(result_ucs['path'])} moves")
print(f" Total path cost : {result_ucs.get('total_cost', 'N/A')}")
print(f" Nodes expanded : {result_ucs['nodes_expanded']:,}")
print(f" Max frontier size : {result_ucs['max_frontier']:,}")
print(f" Time : {result_ucs['time_s']} s\n")
print(" Move sequence:", " → ".join(m for m, _ in result_ucs["path"]))
else:
print(" No solution found.")
=== UCS (uniform step cost = 1) ===
Initial State
1 2 5
3 4 _
6 7 8
Solution depth : 21 moves
Total path cost : 21
Nodes expanded : 105,848
Max frontier size : 44,729
Time : 0.6586 s
Move sequence: Down → Left → Up → Left → Down → Right → Right → Up → Left → Left → Up → Right → Right → Down → Left → Up → Left → Down → Down → Right → Right
# ─── Visualise UCS path ───────────────────────────────────────────────────────
if result_ucs["found"]:
draw_path(result_ucs["path"], START,
title=f"UCS Solution — {len(result_ucs['path'])} moves (total cost {result_ucs.get('total_cost','-')})")
else:
print("UCS did not find a solution.")

Part 5 — Interactive Comparison¶
Use the widget below to:
Enter any starting configuration (a permutation of 0–8, where 0 = blank)
Choose a DFS depth limit
Run all three algorithms and compare results side-by-side
⚠️ Not every tile arrangement is solvable. The widget will warn you if your puzzle is unsolvable.
# ─── Solvability checker ──────────────────────────────────────────────────────
def count_inversions(state):
"""Count the number of inversions (ignoring the blank tile)."""
tiles = [v for v in state if v != 0]
inv = 0
for i in range(len(tiles)):
for j in range(i + 1, len(tiles)):
if tiles[i] > tiles[j]:
inv += 1
return inv
def is_solvable(state):
"""An 8-puzzle is solvable iff the number of inversions is even."""
return count_inversions(state) % 2 == 0
# ─── Bar chart comparison ─────────────────────────────────────────────────────
def plot_comparison(results, start):
"""Draw a 2×2 grid comparing the three algorithms."""
algos = list(results.keys())
colors = ["#4fc3f7", "#81c784", "#ffb74d"]
metrics = {
"Path Length (moves)": [len(r["path"]) if r["found"] else 0 for r in results.values()],
"Nodes Expanded": [r["nodes_expanded"] for r in results.values()],
"Max Frontier Size": [r["max_frontier"] for r in results.values()],
"Time (s)": [r["time_s"] for r in results.values()],
}
fig, axes = plt.subplots(1, 4, figsize=(14, 3.8))
fig.suptitle("Algorithm Comparison", fontsize=13, fontweight="bold")
for ax, (metric, vals) in zip(axes, metrics.items()):
bars = ax.bar(algos, vals, color=colors, edgecolor="#333", linewidth=0.8)
ax.set_title(metric, fontsize=9, fontweight="bold")
ax.set_xticks(range(len(algos)))
ax.set_xticklabels(algos, fontsize=9)
ax.yaxis.set_tick_params(labelsize=8)
for bar, val in zip(bars, vals):
ax.text(bar.get_x() + bar.get_width() / 2,
bar.get_height() * 1.02,
f"{val:,}" if isinstance(val, int) else f"{val:.4f}",
ha="center", va="bottom", fontsize=8, fontweight="bold")
ax.set_ylim(0, max(vals) * 1.25 + 1)
ax.spines[["top", "right"]].set_visible(False)
plt.tight_layout()
plt.show()
# ─── Summary table ────────────────────────────────────────────────────────────
def print_summary_table(results):
header = f"{'Algorithm':<10} {'Found':>6} {'Path':>6} {'Cost':>6} {'Nodes':>9} {'FrontierMax':>12} {'Time(s)':>9}"
print(header)
print("-" * len(header))
for name, r in results.items():
found = "✓" if r["found"] else "✗"
depth = len(r["path"]) if r["found"] else "-"
cost = r.get("total_cost", depth) if r["found"] else "-"
nodes = r["nodes_expanded"]
front = r["max_frontier"]
t = r["time_s"]
print(f"{name:<10} {found:>6} {str(depth):>6} {str(cost):>6} {nodes:>9,} {front:>12,} {t:>9.4f}")
# ─── Interactive Widget ───────────────────────────────────────────────────────
style = {"description_width": "140px"}
layout = widgets.Layout(width="320px")
# Preset puzzles
PRESETS = {
"Easy (2 8 3 | 1 6 4 | 7 _ 5)": "2 8 3 1 6 4 7 0 5",
"Medium (1 2 5 | 3 4 _ | 6 7 8)": "1 2 5 3 4 0 6 7 8",
"Hard (8 6 7 | 2 5 4 | 3 _ 1)": "8 6 7 2 5 4 3 0 1",
"Custom (edit below)": "",
}
w_preset = widgets.Dropdown(
options=list(PRESETS.keys()),
value=list(PRESETS.keys())[0],
description="Preset puzzle:",
style=style, layout=layout,
)
w_state = widgets.Text(
value=PRESETS[w_preset.value],
placeholder="e.g. 2 8 3 1 6 4 7 0 5",
description="State (0=blank):",
style=style, layout=layout,
)
w_depth = widgets.IntSlider(
value=50, min=5, max=100, step=5,
description="DFS depth limit:",
style=style, layout=layout,
continuous_update=False,
)
w_show_path = widgets.Checkbox(
value=True,
description="Show solution paths",
style=style,
)
w_btn = widgets.Button(
description="Run All Algorithms",
button_style="primary",
icon="play",
layout=widgets.Layout(width="200px", height="36px"),
)
w_out = widgets.Output()
def on_preset_change(change):
val = PRESETS.get(change["new"], "")
if val:
w_state.value = val
w_preset.observe(on_preset_change, names="value")
def on_run(b):
with w_out:
clear_output(wait=True)
# Parse state
try:
vals = list(map(int, w_state.value.strip().split()))
except ValueError:
print("❌ Invalid input — enter 9 space-separated integers (0–8).")
return
if sorted(vals) != list(range(9)):
print("❌ State must be a permutation of 0–8.")
return
start = tuple(vals)
if not is_solvable(start):
print("⚠️ This puzzle is UNSOLVABLE (odd number of inversions).")
print(f" Inversions: {count_inversions(start)}")
fig, axes = plt.subplots(1, 2, figsize=(5, 2.8))
draw_state(axes[0], start, title="Your State (Unsolvable)")
draw_state(axes[1], GOAL_STATE, title="Goal State")
plt.tight_layout()
plt.show()
return
print(f"Starting state: {start}")
print(f"Inversions : {count_inversions(start)} (even → solvable)\n")
# Draw start state
fig, ax = plt.subplots(figsize=(2.2, 2.2))
draw_state(ax, start, title="Start")
plt.tight_layout()
plt.show()
depth_limit = w_depth.value
show_path = w_show_path.value
# Run algorithms
print("Running BFS ...", end=" ", flush=True)
r_bfs = bfs(start)
print("done.")
print("Running DFS ...", end=" ", flush=True)
r_dfs = dfs(start, depth_limit=depth_limit)
print("done.")
print("Running UCS ...", end=" ", flush=True)
r_ucs = ucs(start)
print("done.\n")
# Summary
results = {"BFS": r_bfs, "DFS": r_dfs, "UCS": r_ucs}
print_summary_table(results)
# Bar chart
print()
plot_comparison(results, start)
# Paths
if show_path:
for name, result in results.items():
if result["found"]:
draw_path(result["path"], start,
title=f"{name} — {len(result['path'])} moves")
else:
print(f"\n{name}: No solution found within limits.")
w_btn.on_click(on_run)
ui = widgets.VBox([
widgets.HTML("<h3 style='margin-bottom:4px'>🧩 8-Puzzle Solver</h3>"),
widgets.HTML("<p style='font-size:12px;color:#555'>Configure a puzzle and run all three uninformed search algorithms.</p>"),
w_preset,
w_state,
w_depth,
w_show_path,
w_btn,
w_out,
])
display(ui)
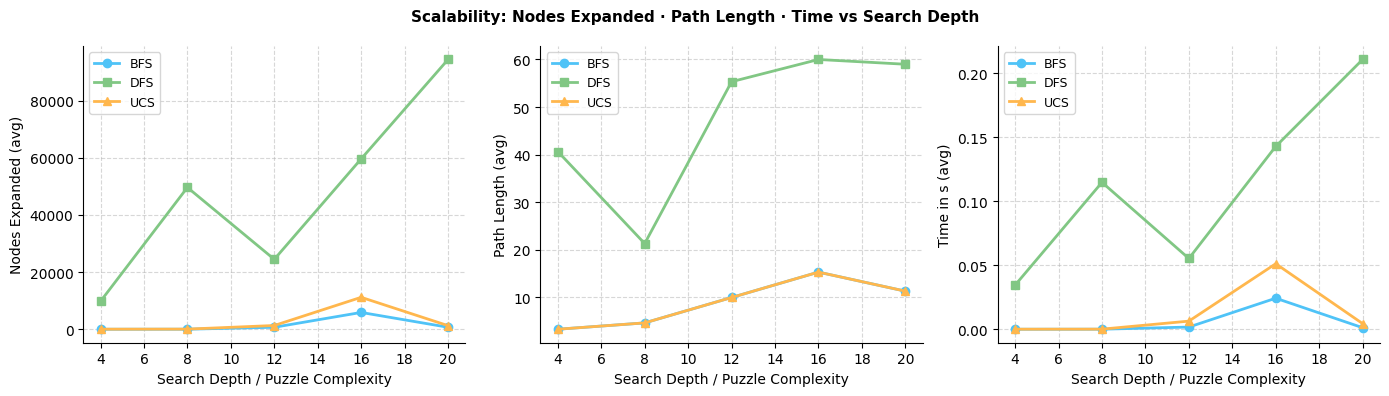
Part 6 — Scalability Analysis¶
Run all three algorithms on a range of puzzles at increasing solution depths and plot how each metric scales.
# ─── Generate puzzles at known depths via random walks ────────────────────────
import random
def random_puzzle(num_moves=10, seed=None):
"""Generate a solvable puzzle by making `num_moves` random moves from the goal."""
rng = random.Random(seed)
state = GOAL_STATE
for _ in range(num_moves):
neighbors = get_neighbors(state)
_, state, _ = rng.choice(neighbors)
return state
# ── Benchmark ─────────────────────────────────────────────────────────────────
depths = [4, 8, 12, 16, 20]
seeds_each = 3 # puzzles per depth level
DFS_LIMIT = 60
data = {
"depth" : [],
"algo" : [],
"nodes_expanded" : [],
"time_s" : [],
"path_len" : [],
}
print(f"{'Depth':>6} {'Seed':>5} {'Algo':>5} {'Nodes':>9} {'Path':>6} {'Time(s)':>9}")
print("-" * 50)
for d in depths:
for seed in range(seeds_each):
puzzle = random_puzzle(num_moves=d * 3, seed=seed * 100 + d) # mix well
if not is_solvable(puzzle):
continue
for algo_name, algo_fn in [("BFS", lambda p: bfs(p)),
("DFS", lambda p: dfs(p, DFS_LIMIT)),
("UCS", lambda p: ucs(p))]:
r = algo_fn(puzzle)
plen = len(r["path"]) if r["found"] else -1
print(f"{d:>6} {seed:>5} {algo_name:>5} {r['nodes_expanded']:>9,} {plen:>6} {r['time_s']:>9.4f}")
data["depth"].append(d)
data["algo"].append(algo_name)
data["nodes_expanded"].append(r["nodes_expanded"])
data["time_s"].append(r["time_s"])
data["path_len"].append(plen)
print("\nBenchmark complete.")
Depth Seed Algo Nodes Path Time(s)
--------------------------------------------------
4 0 BFS 2 2 0.0000
4 0 DFS 3 2 0.0000
4 0 UCS 4 2 0.0001
4 1 BFS 3 2 0.0001
4 1 DFS 14,696 60 0.0709
4 1 UCS 9 2 0.0000
4 2 BFS 52 6 0.0002
4 2 DFS 14,690 60 0.0328
4 2 UCS 99 6 0.0003
8 0 BFS 8 4 0.0000
8 0 DFS 144,103 4 0.3346
8 0 UCS 17 4 0.0001
8 1 BFS 2 2 0.0000
8 1 DFS 3 2 0.0000
8 1 UCS 4 2 0.0000
8 2 BFS 92 8 0.0004
8 2 DFS 4,785 58 0.0099
8 2 UCS 160 8 0.0004
12 0 BFS 1,081 12 0.0025
12 0 DFS 5,343 56 0.0118
12 0 UCS 2,035 12 0.0095
12 1 BFS 991 12 0.0027
12 1 DFS 41,374 50 0.0997
12 1 UCS 1,837 12 0.0094
12 2 BFS 54 6 0.0002
12 2 DFS 26,722 60 0.0546
12 2 UCS 103 6 0.0004
16 0 BFS 2,698 14 0.0119
16 0 DFS 111,308 60 0.2829
16 0 UCS 5,130 14 0.0249
16 1 BFS 12,368 18 0.0545
16 1 DFS 19,631 60 0.0437
16 1 UCS 23,522 18 0.1081
16 2 BFS 2,622 14 0.0066
16 2 DFS 47,943 60 0.1021
16 2 UCS 4,916 14 0.0208
20 0 BFS 878 12 0.0017
20 0 DFS 143,051 -1 0.3568
20 0 UCS 1,583 12 0.0061
20 1 BFS 415 10 0.0008
20 1 DFS 36,133 60 0.0653
20 1 UCS 755 10 0.0018
20 2 BFS 837 12 0.0014
20 2 DFS 104,019 58 0.2103
20 2 UCS 1,493 12 0.0056
Benchmark complete.
# ─── Plot scalability ─────────────────────────────────────────────────────────
import statistics
algo_names = ["BFS", "DFS", "UCS"]
palette = {"BFS": "#4fc3f7", "DFS": "#81c784", "UCS": "#ffb74d"}
markers = {"BFS": "o", "DFS": "s", "UCS": "^"}
fig, axes = plt.subplots(1, 3, figsize=(14, 4))
fig.suptitle("Scalability: Nodes Expanded · Path Length · Time vs Search Depth",
fontsize=11, fontweight="bold")
for algo in algo_names:
# Collect per-depth means
means_nodes, means_path, means_time = [], [], []
for d in depths:
subset_n = [data["nodes_expanded"][i]
for i in range(len(data["depth"]))
if data["depth"][i] == d and data["algo"][i] == algo]
subset_p = [data["path_len"][i]
for i in range(len(data["depth"]))
if data["depth"][i] == d and data["algo"][i] == algo and data["path_len"][i] >= 0]
subset_t = [data["time_s"][i]
for i in range(len(data["depth"]))
if data["depth"][i] == d and data["algo"][i] == algo]
means_nodes.append(statistics.mean(subset_n) if subset_n else 0)
means_path.append(statistics.mean(subset_p) if subset_p else 0)
means_time.append(statistics.mean(subset_t) if subset_t else 0)
kw = dict(color=palette[algo], marker=markers[algo], linewidth=2, markersize=6, label=algo)
axes[0].plot(depths, means_nodes, **kw)
axes[1].plot(depths, means_path, **kw)
axes[2].plot(depths, means_time, **kw)
for ax, ylabel in zip(axes, ["Nodes Expanded (avg)", "Path Length (avg)", "Time in s (avg)"]):
ax.set_xlabel("Search Depth / Puzzle Complexity")
ax.set_ylabel(ylabel)
ax.legend(fontsize=9)
ax.grid(True, linestyle="--", alpha=0.5)
ax.spines[["top", "right"]].set_visible(False)
plt.tight_layout()
plt.show()
Part 7 — Summary & Key Takeaways¶
| Property | BFS | DFS | UCS |
|---|---|---|---|
| Data structure | Queue (FIFO) | Stack (LIFO) | Min-heap |
| Completeness | ✅ Yes | ⚠️ With depth limit | ✅ Yes |
| Optimality | ✅ Shortest path | ❌ No | ✅ Min-cost path |
| Time complexity | |||
| Space complexity | |||
| Best use case | Shallow solutions | Memory-constrained | Non-uniform step costs |
When to choose which algorithm?¶
BFS — when you need the guaranteed shortest solution and memory is not a constraint
DFS — when memory is limited or you just need any valid solution quickly (not necessarily shortest)
UCS — when step costs vary (e.g., different tiles have different move costs); generalises BFS
Next steps¶
Try Iterative Deepening DFS (IDDFS) — combines BFS optimality with DFS space efficiency
Add heuristics → A* search (informed search, much faster for hard puzzles)
Extend to the 15-puzzle (4×4) where uninformed search becomes impractical